
研究紹介
ソフトロボティクスにおける3Dプリント型アクチュエータ「MORI-A」
ソフトロボティクスの分野では、モジュール性の概念が重要な役割を果たしており、複雑な形状を設計するために相互接続できる空気圧アクチュエーターが広く使用されています。シリコーンの格子構造を利用したアクチュエーターや、人工筋肉のように人間の筋骨格システムを模したアクチュエーターがその一例です。このような技術の多様性を確保するためには、モジュール性の原則が不可欠です。
MORI-A : 3D印刷された変形規定構造を内包するソフトアクチュエータ
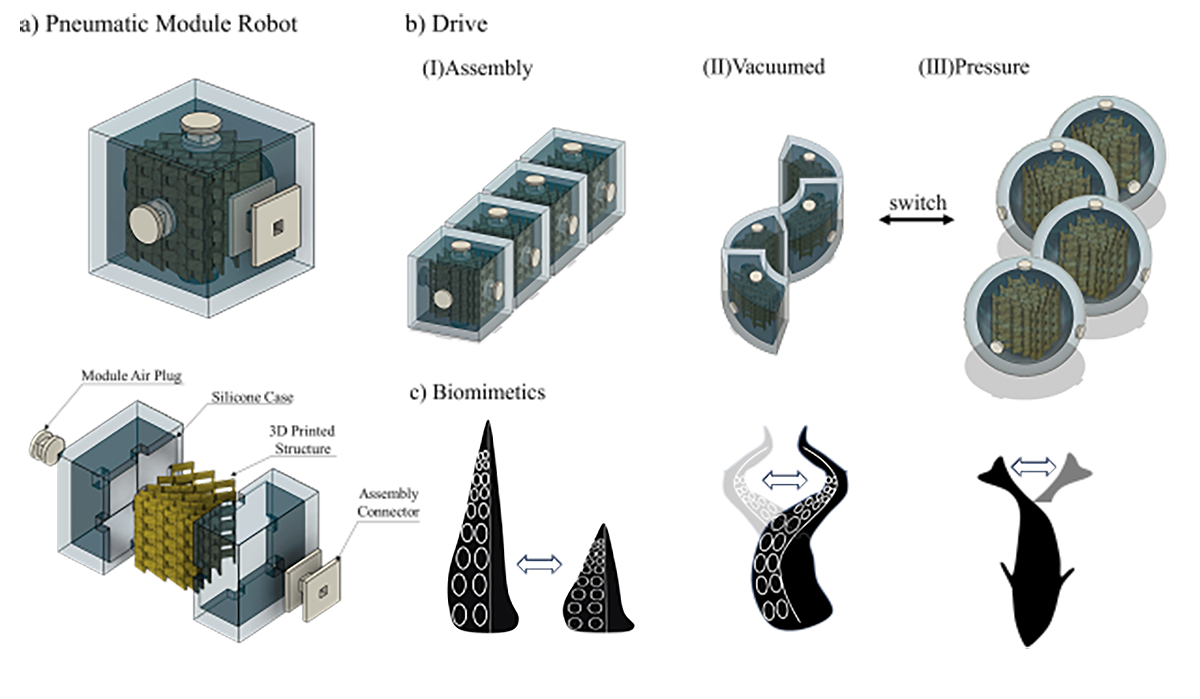
シリコーンの構造を変えるだけでなく、変形を可能にするメタマテリアルのような構造を組み込むことで、多様な変形が可能になります。例えば、魚の泳ぎやミミズのような軟体動物の動きを模倣する例が報告されています。最近では、キュービックボクセル形状に着想を得たソフトアクチュエーターの研究が増加しています。ボクセル形状のインターコネクティビティや、空気圧で変形するシリコーンゴム素材の統合の容易さが、この新しいトレンドに貢献していると考えられます。
しかし、既存のソフトアクチュエーターには、硬化後の物性を変更できないという課題がありました。そこで我々は、3Dプリント構造の座屈構造を利用した新たなソフトアクチュエーター「MORI-A」を開発しました。MORI-Aは、再構成可能で多様な変形が可能なボクセル型の真空駆動モジュールで、製造と組み立てに要する時間を最小限に抑えています。このモジュールは、シリコーンゴム製の中空キューブに取り外し可能な3Dプリント構造を挿入することで、均一な変形パターンを実現します。
MORI-Aの特徴は、圧力と真空の両方で反対の変形パターンを生成できることです。単一の空気流路を使用し、均一な硬度のシリコーンゴムを用いることで、魚のヒレのような周期的な動きを模倣することを目指しました。このモジュールは、膨張と収縮の動作を簡単に切り替えることができます。
MORI-A CPS : MORI-A変形予測・組立用シミュレータ
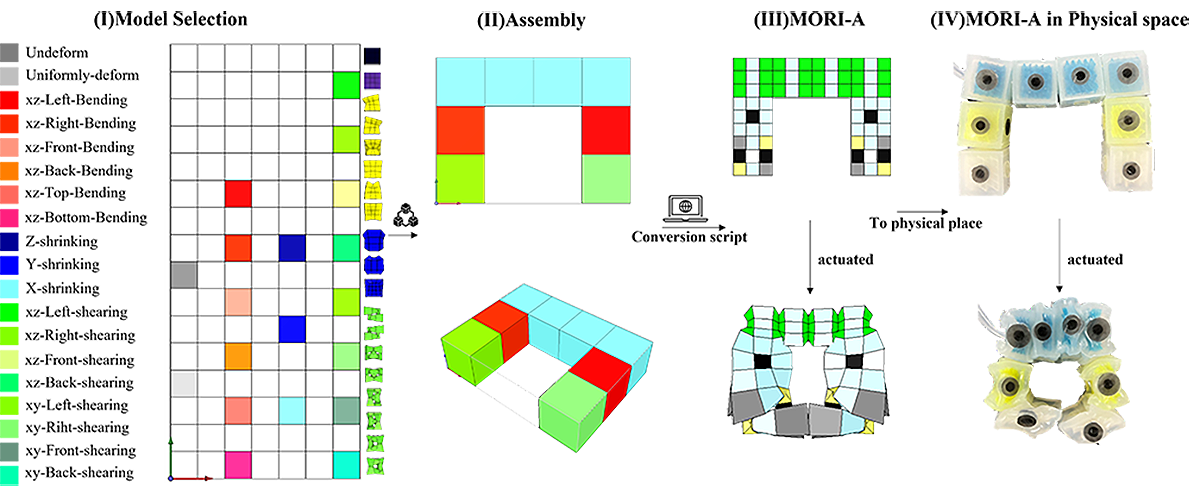
MORI-Aは、ソフトモジュラーロボティクスの研究分野における新しいアプローチです。柔軟な素材と再構成可能なモジュール機構を組み合わせたこの技術は、特に衝撃緩和とソフトな接触が求められる人工筋肉としての応用が期待されています。MORI-Aの組み立てや実際の変形を予測するために、Voxcraftというシミュレーションツールを利用しました。Voxcraftは、ボクセルベースの弾性体シミュレーターであり、各ボクセルの物理特性を設定して仮想的な膨張・収縮を定義することができます。このシステムを用いることで、デザイナーは実際にソフトマシンを組み立てることなく、仮想空間でロボットの変形動作を確認することが可能です。
MORI-A CPS(Cyber-Physical System)は、Voxcraftを基にして開発されたシステムで、単純なキューブ配置のみでMORI-Aソフトモジュールロボットの変形動作を解析します。これにより、デザイナーは使用するモジュールとそのおおよその形状を考慮するだけで、シミュレーションが望んだ通りにロボットを動かすかどうかを確認できます。
この研究では、MORI-A CPSを用いて、均一収縮、一軸収縮、曲げ、剪断などの変形モデルを設計しました。これにより、MORI-Aを実際に組み立てる前に、その変形動作を予測し、デザインを最適化することができます。今後は、ドライブユニットの形状に基づいて適切な変形モデルを自動的に選択するシステムの構築を目指しています。
| Year | Name | Title | Conference |
|---|---|---|---|
| 2022 | Jun Ogawa, Tomoharu Mori, Yosuke Watanabe, Masaru Kawakami, Md Nahin Islam Shiblee, Hidemitsu Furukawa | MORI-A: Soft Vacuum-actuated Module with 3D-Printable Deformation Structure | IEEE Robotics and Automation Letters |
| 2023 | Shoma Abe, Jun Ogawa, Yosuke Watanabe, MD Nahin Islam Shiblee, Masaru Kawakami, Hidemitsu Furukawa | MORI-A CPS: 3D printed soft actuators with 4D assembly simulation | Journal of Artificial Life and Robotics |
| 2022 | 阿部壮真, 小川純, 渡邉洋輔, MD Nahin, Islam Shiblee, 川上勝, 古川英光 | マルチマテリアルで構成する3D印刷型真空駆動ソフトモジュールの拡張 | 第40回 日本ロボット学会学術講演会 |
| 2022 | 阿部壮真, 小川純, 渡邉洋輔, MD Nahin, Islam Shiblee, 川上勝, 古川英光 | 身体に適応するウェアラブルソフトマシンの検討 | Conference on 4D and Functional Fabrication 2022 |
| 2022 | Shoma Abe, Jun Ogawa, Yosuke Watanabe, Md Nahin Islam Shiblee, Masaru Kawakami, Hidemitsu Furukawa | Application of 3D Printed Vacuum-actuated module with Multi-Soft Material to Support Handwork Rehabilitation | The 16th International Symposium on Distributed Autonomous Robotic Systems 2022 (Best Paper Award) |
| 2023 | 阿部壮真, 小川純, 渡邉洋輔, MD Nahin, Islam Shiblee, 川上勝, 古川英光 | 3D印刷型ソフトアクチュエータシステム MORI-A FleX/CPS | 第22回複雑系マイクロシンポジウム (最優秀プレゼンテーション賞) |
| 2023 | Shoma Abe, Jun Ogawa, Yosuke Watanabe, MD Nahin Islam Shiblee, Masaru Kawakami, Hidemitsu Furukawa | MORI-A CPS: Soft modular actuator support with 4D assembly simulation | The 28th International Symposium on Artificial Life and Robotics |
| 2023 | 阿部壮真, 小川純, 松岡沙織, 渡邉洋輔, エムディナヒンイスラムシブリ, 古川英光 | 衣装で飾られた3D印刷型真空駆動アクチュエータによるクラゲを模倣した遊泳美の探求 | 第24回計測自動制御学会システムインテグレーション部門講演会 (SI2023 優秀講演賞) |
| 2024 | Shoma Abe, Jun Ogawa, Yosuke Watanabe, MD Nahin, Islam Shiblee, Hidemitsu Furukawa | Symmetric Deform-Ability Pressure-Vacuum Actuator Via Single Channel | IEEE 7th International Conference on Soft Robotics (RoboSoft) |